Parameter estimation tutorial
Contents
Parameter estimation tutorial#
There are a quite a few steps to analyse GW data. Today we’ll focus on the middle panel:
Note: this notebook has been created by adapting materials from:
! pip install bilby[gw]==1.4.1 -q
# NOTE: you'll have to restart your runtime after this
%matplotlib inline
import bilby
import matplotlib.pyplot as plt
import numpy as np
from tqdm.auto import tqdm
import pandas as pd
from corner.core import quantile
from corner import corner
import requests
from tqdm.auto import tqdm
import logging
import warnings
import os
np.random.seed(42)
INJECTION_URL = "https://sandbox.zenodo.org/record/1163982/files/injection_result.json?download=1"
GW150914_URL = "https://sandbox.zenodo.org/record/1164558/files/GW150914_result.json?download=1"
GW200308_URL = "https://zenodo.org/record/5546663/files/IGWN-GWTC3p0-v1-GW200308_173609_PEDataRelease_mixed_cosmo.h5?download=1"
def notebook_setup():
warnings.filterwarnings("ignore", category=DeprecationWarning)
warnings.filterwarnings("ignore", category=FutureWarning)
warnings.filterwarnings("ignore", category=UserWarning)
warnings.filterwarnings("ignore", category=RuntimeWarning)
logger = logging.getLogger("root")
logger.setLevel(logging.ERROR)
logger = logging.getLogger("bilby")
logger.setLevel(logging.INFO)
plt.style.use("default")
plt.rcParams["savefig.dpi"] = 100
plt.rcParams["figure.dpi"] = 100
plt.rcParams["font.size"] = 16
plt.rcParams["font.family"] = "sans-serif"
plt.rcParams["font.sans-serif"] = ["Liberation Sans"]
plt.rcParams["font.cursive"] = ["Liberation Sans"]
plt.rcParams["mathtext.fontset"] = "custom"
plt.rcParams["axes.grid"] = False
def download(url: str, fname: str):
resp = requests.get(url, stream=True)
total = int(resp.headers.get('content-length', 0))
if os.path.exists(fname):
return
with open(fname, 'wb') as file, tqdm(
desc=f"Downloading {fname}",
total=total,
unit='iB',
unit_scale=True,
unit_divisor=1024,
) as bar:
for data in resp.iter_content(chunk_size=1024):
size = file.write(data)
bar.update(size)
notebook_setup()
RE_RUN_SLOW_CELLS = False
OUTDIR = "outdir"
Bayesian Inference intro#
To start, lets take a look at Bayes’ theorem:
For a primer on Bayesian inference in GW, please look at Eric Thrane + Colm Talbot’s paper.
In this workshop we will focus more on how we can perform inference and not focus too much on the maths.
Lets look at an example of how we can use Bayesian inference to analyse the following data:
observation = np.array([
-1.65, 1.93, 2.88, -2.28, -1.02, 0.35, 1.49, 0.65, -1.95,
3.64, -2.47, 3.91, -2.16, 1.03, 0.6, 6.96, 1.07, -2.69,
-7.18, -0.94, -1.37, -1.09, -2.07, 6.28, 1.73, 1.0, 4.11,
1.29, -1.21, -1.06, 3.67, 0.91, 0.64, -0.4, 9.2, -3.51,
1.89, -2.49, 5.43, 2.36, 0.18, 0.01, 6.85, 2.25, 3.55,
3.43, 3.1, 3.98, -1.06, 6.79, 3.27, -1.62, -4.16, -0.19,
1.75, 6.18, -0.72, -1.4, 0.55, 4.85, 6.83, 10.35, 3.83,
5.46, -0.81, 0.91, 3.36, 2.01, 4.37, 4.03, 6.05, 2.62,
5.16, 3.57, 3.74, 7.07, 3.89, 9.91, 3.89, 3.41, 7.71, 2.79,
3.98, 4.91, 1.87, 2.65, 3.4, 3.42, 11.26, 5.06, 8.83, 2.87,
8.66, 3.95, 6.05, 8.2, 3.07, 2.88, 4.6, 3.84
])
time = np.array([
0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0, 1.1,
1.2, 1.3, 1.4, 1.5, 1.6, 1.7, 1.8, 1.9, 2.0, 2.1, 2.2, 2.3,
2.4, 2.5, 2.6, 2.7, 2.8, 2.9, 3.0, 3.1, 3.2, 3.3, 3.4, 3.5,
3.6, 3.7, 3.8, 3.9, 4.0, 4.1, 4.2, 4.3, 4.4, 4.5, 4.6, 4.7,
4.8, 4.9, 5.0, 5.1, 5.2, 5.3, 5.4, 5.5, 5.6, 5.7, 5.8, 5.9,
6.0, 6.1, 6.2, 6.3, 6.4, 6.5, 6.6, 6.7, 6.8, 6.9, 7.0, 7.1,
7.2, 7.3, 7.4, 7.5, 7.6, 7.7, 7.8, 7.9, 8.0, 8.1, 8.2, 8.3,
8.4, 8.5, 8.6, 8.7, 8.8, 8.9, 9.0, 9.1, 9.2, 9.3, 9.4, 9.5,
9.6, 9.7, 9.8, 9.9
])
def plot_data(ax=None):
if ax is None:
fig, ax = plt.subplots()
ax.plot(time, observation, "o", color='k', zorder=-10)
ax.set_xlabel("time")
ax.set_ylabel("y");
ax.set_xlim(min(time), max(time))
plot_data()
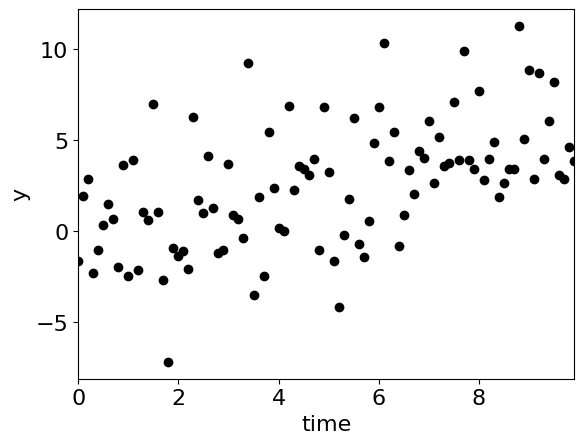
Lets assume:
The observed data
d(t)consists of the following:d(t) = n(t) + s(t).The noise
n(t)isGaussian white noise(drawn from a Normal distribution).The signal
s(t)is a straight-line signal.
With these assumptions, we can start implementing our Bayesian inference pipeline.
Signal Model#
Assuming a straight line signal:
def signal_model(time, m, c):
return time * m + c
Priors#
Now we can write down some priors on the parameters m and c of this model.
This is what we think our parameters can potentially be.
import bilby
priors = bilby.core.prior.PriorDict(dict(
m=bilby.core.prior.TruncatedNormal(mu=0, sigma=1, minimum=0, maximum=3, name="m"),
c=bilby.core.prior.Uniform(-5, 5, name="c"),
))
To test our prior, lets draw some prior samples and print some samples:
import pandas as pd
pd.DataFrame(priors.sample(5))
| m | c | |
|---|---|---|
| 0 | 0.486700 | -3.440055 |
| 1 | 1.944357 | -4.419164 |
| 2 | 1.103103 | 3.661761 |
| 3 | 0.836350 | 1.011150 |
| 4 | 0.196265 | 2.080726 |
Lets plot some histograms of these samples in a corner plot:
from corner import corner
fig = corner(
pd.DataFrame(priors.sample(10000)),
plot_datapoints=False,
plot_contours=False, plot_density=True,
color="tab:gray",
labels=list(priors.keys()),
)
fig.suptitle("Prior Samples");
Text(0.5, 0.98, 'Prior Samples')
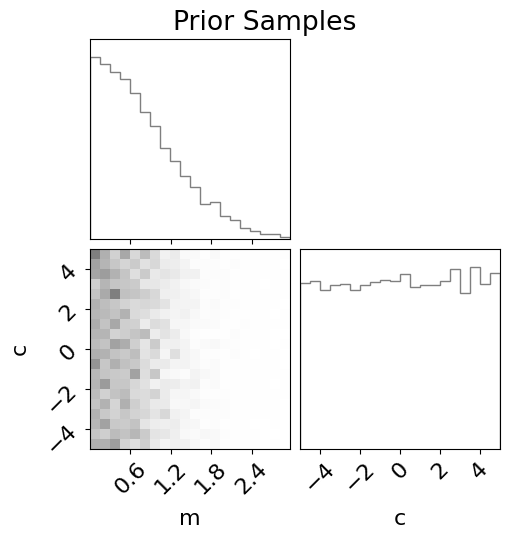
Here each column/row represents one parameter.
The plots along the upper diagonal show the 1D histograms of the parameters.
In the above, these represent pi(m) and pi(c) – the prior distributions for m and c.
The plots on the inside of the corner show the 2D histograms for the intersecting parameters.
Here, the 2D join distribution is pi(m,c).
At this point, lets test out our model and priors:
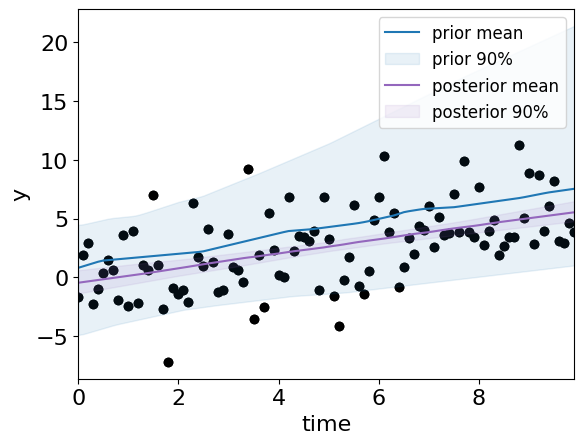
def plot_model_on_data(samples, plot_each_sample=False, color="tab:blue", ax=None, label="model"):
m, c = samples['m'], samples['c']
ys = np.array([signal_model(time, mi, ci) for mi, ci in zip(m, c)]).T
if ax is None:
fig, ax = plt.subplots()
y_low, y_mean, y_up = np.quantile(ys, [0.05, 0.5, 0.95], axis=1)
ax.plot(time, y_mean, color=color, label=f"{label} mean")
ax.fill_between(time, y_low, y_up, alpha=0.1, color=color, label=f"{label} 90%")
if plot_each_sample:
for y in ys.T:
ax.plot(time, y, color=color, alpha=0.1)
plot_data(ax)
ax.legend(frameon=True, fontsize=12)
return ax.get_figure()
fig = plot_model_on_data(priors.sample(30), True, label="prior")
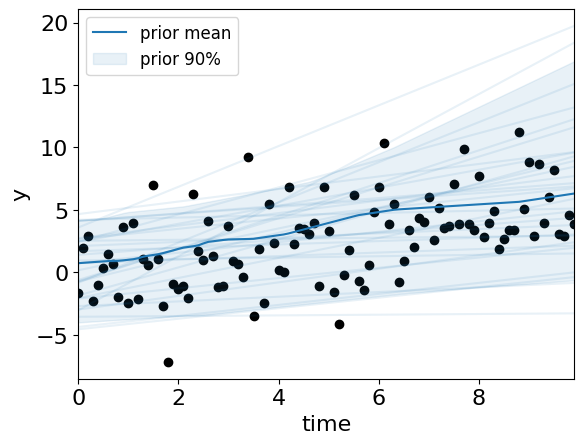
Looks like the model can potentially fit the data! Lets try to use the Bayesian inference framework to help us get estimates on the model parameters.
Likelihood#
Recall the assumption that d(t) = n(t) + s(t), and that the noise is normally distributed. Using this, we can write:
[NOTE: we’ve hardcoded sigma here, but you could add in a prior on sigma as well]
Hence, we can write out the signal-model likliood L(data|m,c) as:
This type of Gaussian likelihoods has already been coded up in bilby:
likelihood = bilby.likelihood.GaussianLikelihood(time, observation, signal_model, sigma=3)
Let’s test if we can compute a likelihood and dont get a nan:
# we need to provide the parameter to compute the likeliood for
likelihood.parameters = dict(m=0, c=0)
print(f"Log Likelihood (data| {likelihood.parameters}) = {likelihood.log_likelihood():.2f}")
Log Likelihood (data| {'m': 0, 'c': 0}) = -302.77
Brute force posterior computation#
We now have everything we need to compute our posterior!
In the first pass, lets compute the posterior over a grid of m and c values:
def get_grid_of_m_c(n_per_dim, prior):
assert "m" in prior and "c" in prior
samples = pd.DataFrame(prior.sample(10000))
m_vals = np.linspace(min(samples.m), max(samples.m), n_per_dim)
c_vals = np.linspace(min(samples.c), max(samples.c), n_per_dim)
m_grid, c_grid = np.meshgrid(m_vals, c_vals)
return pd.DataFrame(dict(m=m_grid.flatten(), c=c_grid.flatten()))
def plot_grid(m_c_grid, c="tab:blue", ax=None):
if ax is None:
fig, ax = plt.subplots(figsize=(3,3))
ax.scatter(m_c_grid.m, m_c_grid.c, c=c, s=12.5, marker='s',alpha=0.5)
ax.set_xlabel("m");
ax.set_ylabel("c");
return ax.figure
m_c_grid = get_grid_of_m_c(100, priors)
fig = plot_grid(m_c_grid)
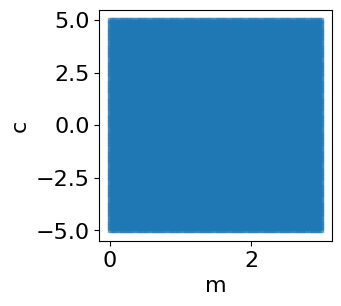
Computing the prior, likelhood and posterior at each grid-point:
def run_brute_force_analysis(likelihood, prior, samples_list):
n = len(samples_list)
log_likelihoods = np.zeros(n)
log_priors = np.zeros(n)
log_posteriors = np.zeros(n)
log_evidence = 0
for i in tqdm(range(n), desc="Brute force LnL computation"):
likelihood.parameters = samples_list[i]
log_likelihoods[i]=likelihood.log_likelihood()
log_priors[i] = prior.ln_prob(samples_list[i])
log_posteriors[i] = log_priors[i] + log_likelihoods[i]
log_evidence = np.logaddexp.reduce(log_posteriors+log_priors)
return dict(
samples=pd.DataFrame(samples_list),
log_evidence=log_evidence,
likelihood=np.exp(log_likelihoods),
prior=np.exp(log_priors),
posterior=np.exp(log_posteriors)
)
def plot_grids_of_brute_result(res, xlims=None, log_vals=False):
fig, axes = plt.subplots(1,3, sharey=True, figsize=(7.5,3))
pi, post, like = res['prior'], res['posterior'], res['likelihood']
prefix = ""
if log_vals:
pi, post, like = np.log(pi), np.log(post), np.log(like)
prefix = "log "
axes[0].set_title(prefix+"$\pi(m,c)$")
plot_grid(m_c_grid, c=pi, ax=axes[0])
axes[1].set_title(prefix+"$L(data|m,c)$")
plot_grid(m_c_grid, c=like, ax=axes[1])
axes[2].set_title(prefix+"$p(m,c|data)$")
plot_grid(m_c_grid, c=post, ax=axes[2])
if xlims is not None:
for ax in axes:
ax.set_xlim(*xlims)
fig.tight_layout()
return fig
brute_result = run_brute_force_analysis(likelihood, priors, m_c_grid.to_dict('records'))
fig = plot_grids_of_brute_result(brute_result)
print(f"Brute force log evidence = {brute_result['log_evidence']}")
Brute force log evidence = -250.1758114091579
Brute force LnL computation: 0%| | 0/10000 [00:00<?, ?it/s]
Brute force LnL computation: 7%|6 | 680/10000 [00:00<00:01, 6795.16it/s]
Brute force LnL computation: 19%|#8 | 1880/10000 [00:00<00:00, 9851.53it/s]
Brute force LnL computation: 31%|### | 3084/10000 [00:00<00:00, 10845.24it/s]
Brute force LnL computation: 43%|####2 | 4294/10000 [00:00<00:00, 11337.70it/s]
Brute force LnL computation: 55%|#####5 | 5505/10000 [00:00<00:00, 11612.21it/s]
Brute force LnL computation: 67%|######7 | 6713/10000 [00:00<00:00, 11770.69it/s]
Brute force LnL computation: 79%|#######9 | 7925/10000 [00:00<00:00, 11881.70it/s]
Brute force LnL computation: 91%|#########1| 9114/10000 [00:00<00:00, 11853.03it/s]
Brute force LnL computation: 100%|##########| 10000/10000 [00:00<00:00, 11415.85it/s]
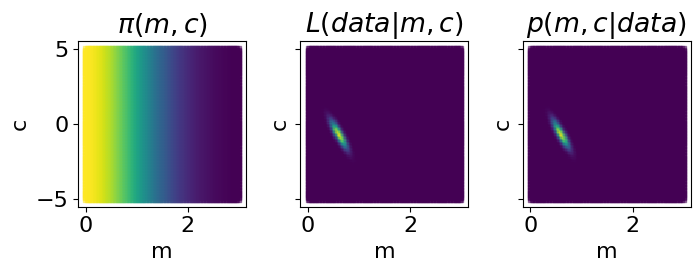
Looks like the answer is around
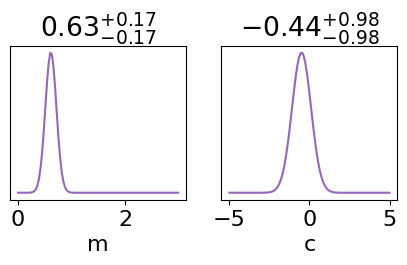
We can even compute the marginal posteriors:
These will give us the estimated values for the model parameters
from corner.core import quantile
def get_marginalised_posterior(parameter, res):
grid = res["samples"].copy()
unique_values = np.unique(grid[parameter])
log_post = np.zeros(len(unique_values))
grid['log_post'] = np.log(res['posterior'])
for i, value in enumerate(unique_values):
subset = grid[grid[parameter] == value]
log_post[i] = np.logaddexp.reduce(subset["log_post"])
return unique_values, np.exp(log_post)
fig, axes = plt.subplots(1,2, figsize=(5,2))
for ax, p in zip(axes, ['m', 'c']):
x, p_of_x = get_marginalised_posterior(p, brute_result)
ax.plot(x, p_of_x, color="tab:purple")
low, mean, up = quantile(x, q=[0.05, 0.5, 0.95], weights=p_of_x)
low, up = mean-low, up-mean
title = r"${{{0:.2f}}}_{{-{1:.2f}}}^{{+{2:.2f}}}$".format(mean, low, up)
ax.set_yticks([])
ax.set_title(title)
ax.set_xlabel(p)
Lets also plot the posterior predictive check:
fig = plot_model_on_data(priors.sample(30), label="prior")
fig = plot_model_on_data(
m_c_grid.sample(30, weights=brute_result['posterior']),
color="tab:purple", ax=fig.axes[0], label="posterior"
)
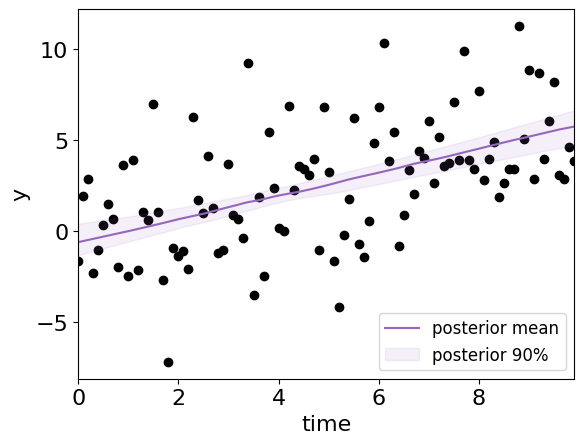
This time with just the posterior:
fig = plot_model_on_data(
m_c_grid.sample(30, weights=brute_result['posterior']),
color="tab:purple", label="posterior"
)
Sampling from the posterior#
There are some drawbacks from brute-force posterior estimation.
What happens when the number of parameters increases to 15?
Drawing samples from the posterior and trying to estimate the likelihood may be a cheaper approach.
Below is some code to demonstrate how we can use bilby + a nested sampler “dynesty” to do this:
def sampler_run():
result = bilby.run_sampler(
likelihood=likelihood,
priors=priors,
sampler="dynesty",
nlive=500,
sample="unif",
outdir=OUTDIR,
label="linear_regression",
)
return result
sampler_result = sampler_run()
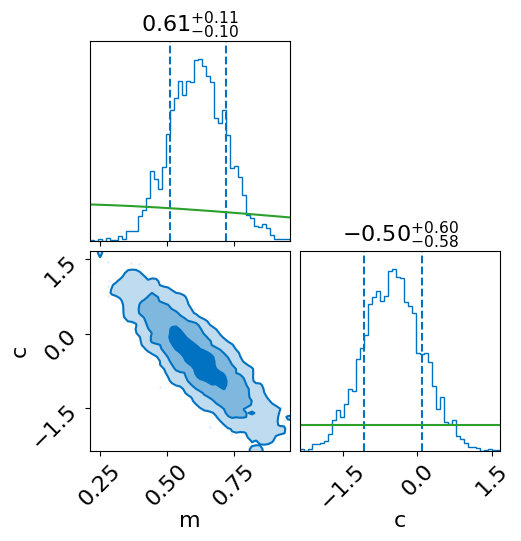
Now we can make some plots.
First, lets plot the corner plot, and overplot the prior (in green) in the 1D distribution:
fig = sampler_result.plot_corner(priors=True, save=False)
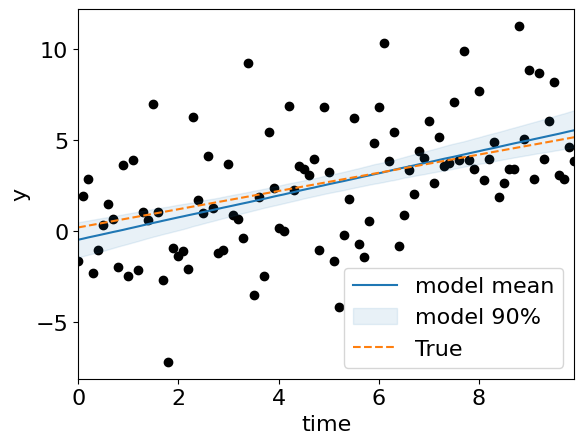
Now lets check how well we have done (comparing against the true value):
truths = {'c': 0.2, 'm': 0.5, 'sigma': 3}
fig = plot_model_on_data(sampler_result.posterior.sample(1000))
fig.axes[0].plot(time, signal_model(time, m=truths['m'], c=truths['c']), color="tab:orange", ls='--', label="True")
fig.axes[0].legend();
<matplotlib.legend.Legend at 0x137e28d30>
Lets finally compare the brute-force results and the nested-sampling results:
def overplot_sampler_and_brute_force(sampler_result, brute_result, truths):
truths = dict(m=truths["m"], c=truths["c"])
fig = sampler_result.plot_corner(parameters=truths, save=False)
# overplot the grid estimates
axes = fig.axes
# add marginals
for p, axi in zip(["m", "c"],[0, 3]):
ax = axes[axi].twinx()
ax.set_yticks([])
x, p_of_x = get_marginalised_posterior(p, brute_result)
ax.plot(x, p_of_x, color="tab:purple", alpha=0.9)
ax.set_ylim(0, 1.15 * np.max(p_of_x))
samples_grid = brute_result['samples']
n_cells = int(np.sqrt(len(samples_grid)))
m_grid = samples_grid['m'].values.reshape(n_cells, n_cells)
c_grid = samples_grid['c'].values.reshape(n_cells, n_cells)
posterior_grid = brute_result['posterior'].reshape(n_cells, n_cells)
axes[2].contourf(
m_grid, c_grid, posterior_grid,
levels=np.quantile(posterior_grid, [0.95, 0.99, 1]),
cmap="Purples"
)
axes[1].plot([],[], label="Sampler", color="tab:blue")
axes[1].plot([],[], label="Brute-Force", color="tab:purple")
axes[1].plot([],[], label="True", color="tab:orange")
axes[1].legend(frameon=False, loc='upper right')
print(f"Brute force ln_evidence: {brute_result['log_evidence']}")
print(f"Sampler ln_evidence: {sampler_result.log_evidence}")
overplot_sampler_and_brute_force(sampler_result, brute_result, truths)
Brute force ln_evidence: -250.1758114091579
Sampler ln_evidence: -253.34704697023392
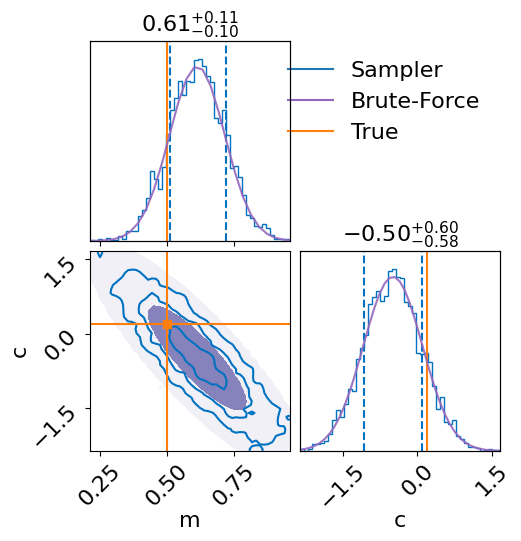
Both sets of results match up quite well! Even the log-evidences are comparable.
Lets move on to GW signals!
CBC GW Signal Model#
The GW from compact binary coalescence (CBC) systems can be modeled using the following parameters:
2 mass parameters (eg m1, m2)
6 spin parameters (eg s1x, s1y, s1z, …)
2 tidal deformation parameters (for neutron stars, lambda1, lambda2)
2 orbital eccentricity parameters (e, arg of periastron)
7 extrinsic parameters (distance, sky-loc, timing, phase)
Some of these are shown here:

Additionally, there are quite a few re-parameterisations of these.
For example, instead of the component masses $m_1, m_2$, one could also use the
mass_ratio:q=m_2/m_1wherem_1>m_2, andchirp_mass:
Similarly, we can use parameterize the dimensionless spins with the following 6 parameters:
chi_ior $a_i$ : the spin magnitude (0<a_i<1)theta_iortilt_i: the angle of the component binary wrt thezaxis (along the orbital axis)phi_12: the difference between the component spins projected on thexyplane (along the orbital plane)theta_jl: the angle between the orbital angular momentumLvector and the total angular momentum vectorJ.
Lets go over all the parameters in more detail:
INTRINSIC PARAMETERS
Mass: 2D
Usually uniform in two mass parameters
Component masses widely used (
m_1, m_2)“Chirp” mass and mass ratio a more convenient basis
Usually specified in the “detector-frame”, redshifted relative to true “source-frame” mass
Dimensionless Spin: 6D
Fully precessing (see animation)
usually uniform in magnitude and isotropic in orientation
Only spin aligned with orbital angular momentum - set planar spin components to zero
same prior on aligned spin as in the precessing case
uniform in aligned spin
Zero spin
all spin components are zero
smaller space to sample
Orbital eccentricity: 1D/2D
Often ignored (eccentricity and argument of periastron)
Matter effects (for neutron stars): 2D
Two tidal deformability parameters
Lambda_iParameters describing the neutron star equation of state (EoS)
Variable number
Zero-dimensional for fixed equation of state
EXTRINSIC PARAMETERS
Location: 3D
ra, dec, distance
Usually isotropic over the sky
Distance prior uniform in volume
Should include cosmological effects
Use host galaxy location, e.g., GW170817, S190521g(?)
Orientation: 4D
Three Euler angles (phase, inclination, polarisation)
Assumed to be distributed isotropically
Merger time
Uniform based on expected uncertainty in trigger time
Typically ~ 0.1s
Note: increasing the spin in the x-y components can lead to precession.
Such a highly precessing system may be found in globular clusters/AGNs.
Lets plot our own waveform:
import bilby
from bilby.gw.conversion import chirp_mass_and_mass_ratio_to_component_masses
import numpy as np
import logging
bilby_logger = logging.getLogger("bilby")
bilby_logger.setLevel(logging.ERROR)
def make_waveform_generator(approximant="IMRPhenomPv2", duration=4, sampling_frequency=1024,
frequency_domain_source_model=bilby.gw.source.lal_binary_black_hole, ):
"""Create a waveform generator"""
generator_args = dict(
duration=duration,
sampling_frequency=sampling_frequency,
frequency_domain_source_model=frequency_domain_source_model,
waveform_arguments=dict(
waveform_approximant=approximant,
reference_frequency=20.,
)
)
return bilby.gw.WaveformGenerator(**generator_args)
def compute_waveform(waveform_generator, signal_parameters={}):
"""Compute the waveform"""
parameters = dict(
# two mass parameters
mass_1=30, mass_2=30,
# 6 spin parameters
a_1=0.0, a_2=0.0, tilt_1=0, tilt_2=0, phi_jl=0, phi_12=0,
# 2 tidal deformation parameters (for NS)
lambda_1=0, lambda_2=0,
# 7 extrinsic parameters (skyloc, timing, phase, etc)
luminosity_distance=1000,
theta_jn=0, ra=0, dec=0,
psi=0, phase=0,
geocent_time=0,
)
parameters.update(signal_parameters)
bilby_logger.info(f"computing waveform with parameters: {parameters}")
h = waveform_generator.time_domain_strain(parameters)
t = waveform_generator.time_array
approximant = waveform_generator.waveform_arguments["waveform_approximant"]
delta_t = 1. / waveform_generator.sampling_frequency
if "IMR" in approximant:
# IMR templates the zero of time is at max amplitude (merger)
# thus we roll the waveform back a bit
for pol in h.keys():
h[pol] = np.roll(h[pol], - len(h[pol]) // 3)
h_phase = np.unwrap(np.arctan2(h['cross'], h['plus']))
h_freq = np.diff(h_phase) / (2 * np.pi * delta_t)
# nan the freqs after the merger
h_freq[np.argmax(h_freq):] = np.nan
return h, h_freq, t
def plot_waveform(waveform_generator, signal_parameters={}, fig=None, polarisation='plus', label="", color="tab:blue"):
h, h_freq, h_time = compute_waveform(waveform_generator, signal_parameters)
if fig is None:
fig, ax = plt.subplots(1, 1, figsize=(10, 3))
else:
ax = fig.axes[0]
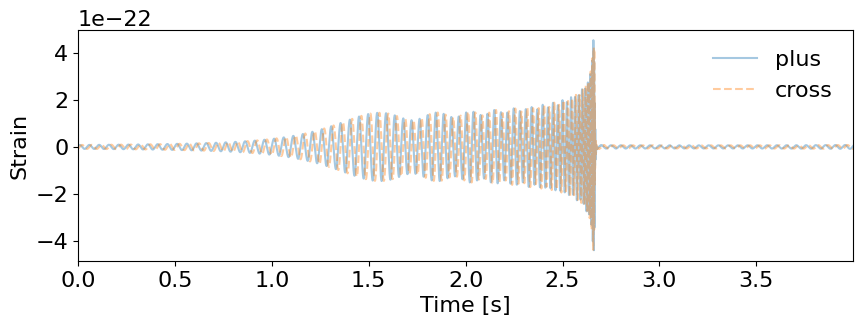
if polarisation =='both':
ax.plot(h_time, h['plus'], alpha=0.4, label='plus')
ax.plot(h_time, h['cross'], alpha=0.4, label='cross', ls="--")
ax.legend(frameon=False)
else:
ax.plot(h_time, h[polarisation], alpha=0.5, label=label, color=color)
ax.set_xlabel("Time [s]")
ax.set_ylabel("Strain")
ax.set_xlim(min(h_time), max(h_time))
# remove whitespace between subplots
fig.subplots_adjust(hspace=0)
return fig
waveform_generator = make_waveform_generator(approximant="IMRPhenomPv2")
bilby_logger.setLevel(logging.DEBUG)
fig = plot_waveform(waveform_generator, dict(mass_1=20., mass_2=25., psi=0.5), polarisation='both')
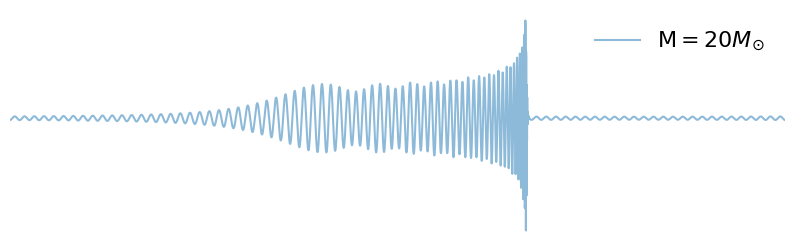
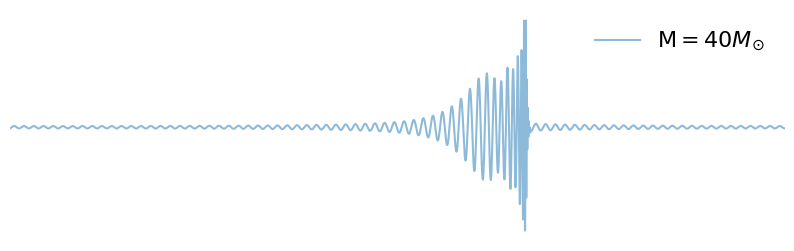
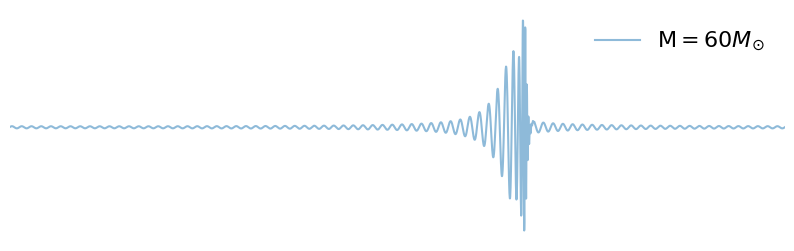
Q: What happens if we increase chirp-mass?
bilby_logger.setLevel(logging.ERROR) # turn off logging
for mc in np.linspace(20, 60, 3):
m1, m2 = chirp_mass_and_mass_ratio_to_component_masses(mc, 1)
signal_parameters = dict(mass_1=m1, mass_2=m2)
fig = plot_waveform(waveform_generator, signal_parameters, label=r"$\mathcal{M} = "+ f"{int(mc)}" + "M_{\odot}$")
fig.axes[0].axis('off')
fig.axes[0].legend(frameon=False)
Playing around with some interactive plots can also help build some intuition:
from ipywidgets import interact
# @interact(a_1=(0.01, 1.0, 0.1)) # uncomment to enable interactive plot
def interact_a1(a_1=0.5):
fig = plot_waveform(waveform_generator, dict(a_1=0.01, a_2=1), label=f"a_1=0.01", color="tab:red")
fig = plot_waveform(waveform_generator, dict(a_1=a_1, a_2=1), fig=fig, label=f"a_1={a_1:.2f}", color="tab:blue")
fig.axes[0].axis('off')
fig.axes[0].legend(frameon=False)
fig.axes[0].set_xlim(1.2, 2.8)
#@interact(dist=(1000, 10000, 500)) # uncomment to enable interactive plot
def interact_dist(dist=2000):
fig = plot_waveform(waveform_generator, dict(luminosity_distance=1000), label=f"d=1000 Mpc", color="tab:red")
fig = plot_waveform(waveform_generator, dict(luminosity_distance=dist), fig=fig, label=f"d={dist} Mpc", color="tab:blue")
fig.axes[0].legend(frameon=False)
fig.axes[0].set_ylim(-7e-22,7e-22)
CBC Parameter Estimation#
Finally, we get to actual parameter estimation for gravitational waves!
Simulate a signal#
We start by first simulating a signal (using the same code as the previous section for waveform generation)
import bilby
import numpy as np
import logging
bilby_logger = logging.getLogger("bilby")
bilby_logger.setLevel(logging.INFO)
# Simulate signal
duration, sampling_freq, min_freq = 4, 1024., 20
injection_parameters = dict(
mass_1=36.0, mass_2=29.0, # 2 mass parameters
a_1=0.1, a_2=0.1, tilt_1=0.0, tilt_2=0.0, phi_12=0.0, phi_jl=0.0, # 6 spin parameters
ra=1.375, dec=-1.2108, luminosity_distance=2000.0, theta_jn=0.0, # 7 extrinsic parameters
psi=2.659, phase=1.3,
geocent_time=1126259642.413,
)
inj_m1, inj_m2 = injection_parameters['mass_1'], injection_parameters['mass_2']
inj_chirp_mass = bilby.gw.conversion.component_masses_to_chirp_mass(inj_m1, inj_m2)
inj_q = bilby.gw.conversion.component_masses_to_mass_ratio(inj_m1, inj_m2)
waveform_generator = bilby.gw.WaveformGenerator(
duration=duration,
sampling_frequency=sampling_freq,
frequency_domain_source_model=bilby.gw.source.lal_binary_black_hole,
parameter_conversion=bilby.gw.conversion.convert_to_lal_binary_black_hole_parameters,
waveform_arguments=dict(
waveform_approximant="IMRPhenomD",
reference_frequency=20.0,
minimum_frequency=min_freq,
)
)
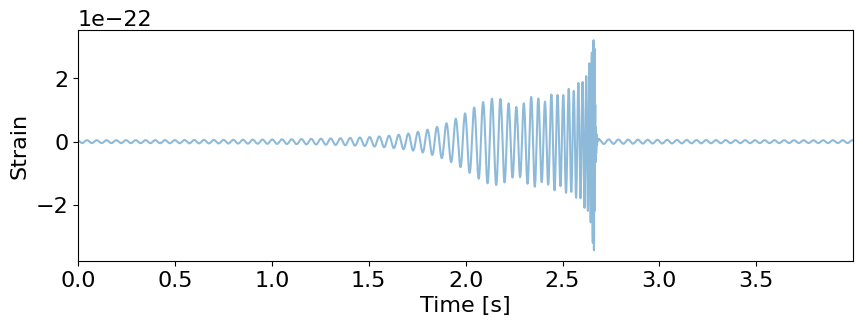
print("This is the signal we will inject into the detector noise")
fig = plot_waveform(waveform_generator, injection_parameters)
This is the signal we will inject into the detector noise
Inject the signal into an interferometer’s data stream#
We can now simulate some detector noise and inject this signal into the detector-noise
# Inject the signal into 1 detectors LIGO-Hanford (H1) at design sensitivity
ifos = bilby.gw.detector.InterferometerList(["H1"])
ifos.set_strain_data_from_power_spectral_densities(
sampling_frequency=sampling_freq,
duration=duration,
start_time=injection_parameters["geocent_time"] - 2,
)
ifos.inject_signal(
waveform_generator=waveform_generator, parameters=injection_parameters
)
for interferometer in ifos:
analysis_data = abs(interferometer.frequency_domain_strain)
fig = plt.figure()
plt.loglog(interferometer.frequency_array, analysis_data, label="Data", color="tab:orange", alpha=0.25)
plt.loglog(interferometer.frequency_array, abs(interferometer.amplitude_spectral_density_array),
label="ASD (estimated noise)", color="tab:orange")
plt.xlim(interferometer.minimum_frequency, interferometer.maximum_frequency)
plt.xlabel("Frequency [Hz]")
plt.ylabel(r'Strain [strain/$\sqrt{\rm Hz}$]')
plt.legend(frameon=False)
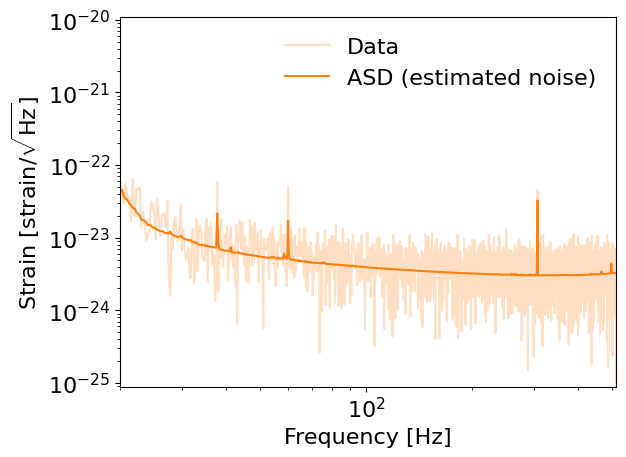
Notes about noise:#
Lots of short duration glitches
The main contribution to LIGO/Virgo/KAGRA data is coloured Gaussian noise.
Constant frequency “lines”
The Gaussian noise is described by the noise amplitude (power) spectral density, ASD (PSD).
Most conveniently described in the frequency domain using a circularly-symmetric complex normal distribution.
Power/Ampitude-spectral-density generation (PSD/ASD)#
Average over data (normally do this)
Divide a long chunk of data and average the power in each chunk
Assumes the PSD does not vary with time
Assumes data are Gaussian over the full time stretch
Has well defined statistical uncertainty
Fit a parameterised model to the data (eg using instrumental info from Dan Brown’s talk)
E.g.,
BayesLineDescribing the PSD requires lots of parameters
Estimating all these parameters is difficult and computationally expensive
Especially expensive marginalise over the uncertainty in the model while fitting CBC signal models
Glitches#
Short term, terrestrial, non-Gaussian transients
Can bias parameter estimation if overlapping signal
Can bias PSD estimation To mitigate:
Zero out data containing glitch, “gating”
Also potentially removes signal
Can bias PSD estimation if care is not taken
Fit a parameterised model to remove the glitch
E.g.,
BayesWaveDescribing the PSD requires lots of parameters
Estimating all these parameters is difficult and computationally expensive
Especially expensive marginalise over the uncertainty in the model while fitting CBC signal models
Lines#
Data at specific frequencies are persistently non-Gaussian and non-stationary
Large amplitude can cause spectral leakage
Need to apply a window
Many have known causes
Suspension “violin” modes
Calibration lines
Mains power lines
…
Some can be subtracted (“cleaned”) from the data stream
Can be correlated between detectors
Commonly not analysed when searching for long-duration signals
Included in compact binary coalescence parameter estimation (for now…)
Create priors for analysis#
Since sampling all parameters will take a long time, we set delta-functions to all but one mass parameter (chirp-mass).
# We sample in chirp-mass and mass-ratio, however--these are quite un-astrophysical priors
# but in post-processing convert to uniform-in-component masses
priors = bilby.gw.prior.BBHPriorDict()
for key in [
"a_1",
"a_2",
"tilt_1",
"tilt_2",
"phi_12",
"phi_jl",
"psi",
"ra",
"dec",
"geocent_time",
"phase",
"theta_jn",
"luminosity_distance",
]:
priors[key] = injection_parameters[key]
priors["mass_ratio"] = inj_q
priors["chirp_mass"] = bilby.gw.prior.UniformInComponentsChirpMass(
minimum=inj_chirp_mass - 5,
maximum=inj_chirp_mass + 5
)
# Perform a check that the prior does not extend to a parameter space longer than the data
priors.validate_prior(duration, min_freq);
True
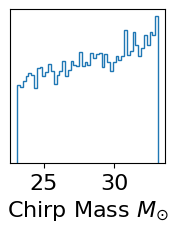
Making some plots of the priors:
mc = priors.sample(10000)['chirp_mass']
fig, ax = plt.subplots(figsize=(2,2))
ax.hist(mc, histtype='step', bins=50)
ax.set_yticks([])
ax.set_xlabel("Chirp Mass " + r"$M_{\odot}$" );
Text(0.5, 0, 'Chirp Mass $M_{\\odot}$')
Create the likelihood to use for analysis#
Similar to the line-signal in Gaussian noise case, we assume that the GW signal is embedded in some Gaussian noise. We also assume that the noise is stationary.
With these asumptions, we can use the Whittle likelihood:
Here:
dis the frequency-domain strain data,his the template waveform
This can be instantiated in bilby like so:
# the IFOs contain the data and PSD for each detector
# the waveform generator can generate differnt h(t)
likelihood = bilby.gw.GravitationalWaveTransient(
interferometers=ifos,
waveform_generator=waveform_generator,
)
Run inference#
if RE_RUN_SLOW_CELLS:
# Run sampler. In this case we're going to use the `dynesty` sampler
result = bilby.run_sampler(
likelihood=likelihood,
priors=priors,
sampler="dynesty",
npoints=250,
nlive=100, walks=25,
dlogz=0.1,
injection_parameters=injection_parameters,
outdir=OUTDIR,
label="injection",
conversion_function=bilby.gw.conversion.generate_all_bbh_parameters,
result_class=bilby.gw.result.CBCResult,
)
else:
print("Skipping sampling...")
fn = f"{OUTDIR}/injection_result.json"
download(INJECTION_URL, fn)
result = bilby.gw.result.CBCResult.from_json(filename=fn)
print("Loaded result!")
Skipping sampling...
Loaded result!
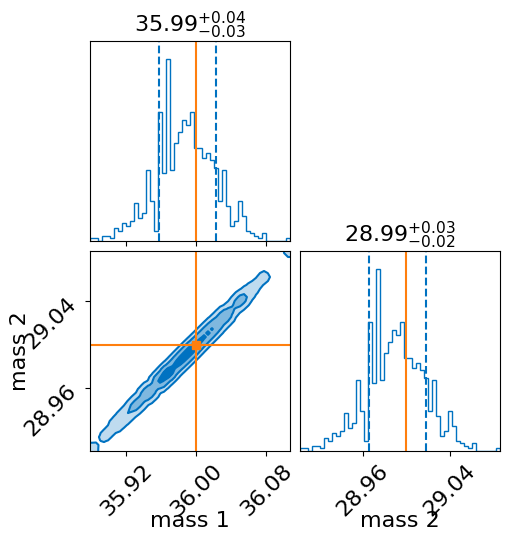
Make some plots#
result.plot_corner(parameters=["mass_1", "mass_2"], truths=[inj_m1, inj_m2], save=False)
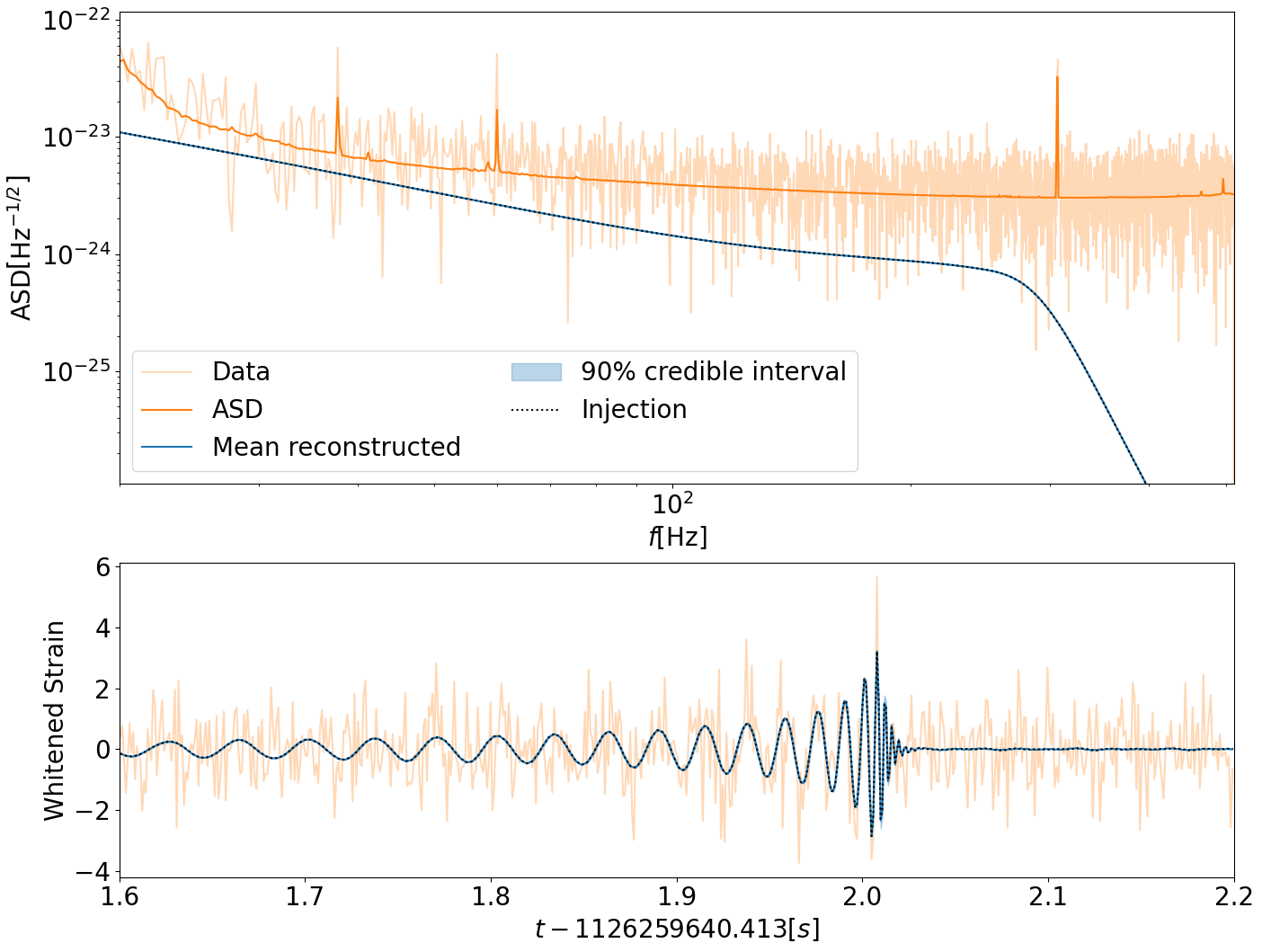
for interferometer in ifos:
fig = result.plot_interferometer_waveform_posterior(
interferometer=interferometer, save=False
)
plt.show()
Cleanup#
# lets clear up some memory before proceeding to the next section!
del result
del ifos
Analysis of GW150914#
Lets analyse a real event!
Setup#
First we import some functions so we dont need to put in the full path
import numpy as np
import bilby
from bilby import run_sampler
from bilby.core.prior import Constraint, Uniform
from bilby.gw.conversion import (
convert_to_lal_binary_black_hole_parameters,
generate_all_bbh_parameters
)
from bilby.gw.detector.networks import InterferometerList
from bilby.gw.detector.psd import PowerSpectralDensity
from bilby.gw.likelihood import GravitationalWaveTransient
from bilby.gw.prior import BBHPriorDict
from bilby.gw.result import CBCResult
from bilby.gw.source import lal_binary_black_hole
from bilby.gw.utils import get_event_time
from bilby.gw.waveform_generator import WaveformGenerator
from gwpy.plot import Plot as GWpyPlot
from gwpy.timeseries import TimeSeries
import os
import logging
bilby_logger = logging.getLogger("bilby")
bilby_logger.setLevel(logging.ERROR)
Downloading IFO data#
Now we download the raw data and make some plots
def download_strain(ifo_name, start_time, end_time, outdir):
"""Download strain data from GWOSC"""
fname = f"{outdir}/{ifo_name}-{start_time}-{end_time}.hdf5"
if os.path.exists(fname):
data = TimeSeries.read(fname)
else:
data = TimeSeries.fetch_open_data(ifo_name, start_time, end_time)
data.write(fname)
return data
interferometers = InterferometerList(["H1", "L1"])
trigger_time = get_event_time("GW150914")
start_time = trigger_time - 3
duration = 4
end_time = start_time + duration
roll_off = 0.2
# Get raw data
raw_data = {}
for ifo in interferometers:
print(
f"Getting {ifo.name} analysis data segment (can take ~ 30s)"
)
analysis_data = download_strain(ifo.name, start_time, end_time, outdir=OUTDIR)
ifo.strain_data.roll_off = roll_off
ifo.strain_data.set_from_gwpy_timeseries(analysis_data)
raw_data[ifo.name] = analysis_data
Getting H1 analysis data segment (can take ~ 30s)
Getting L1 analysis data segment (can take ~ 30s)
# plot raw data:
plot = GWpyPlot(figsize=(12, 4.8))
ax = plot.add_subplot(xscale='auto-gps')
for ifo_name, data in raw_data.items():
ax.plot(data, label=ifo_name)
ax.set_epoch(1126259462.427)
ax.set_xlim(1126259462, 1126259462.6)
ax.set_ylabel('Strain noise')
ax.legend()
plot.show()
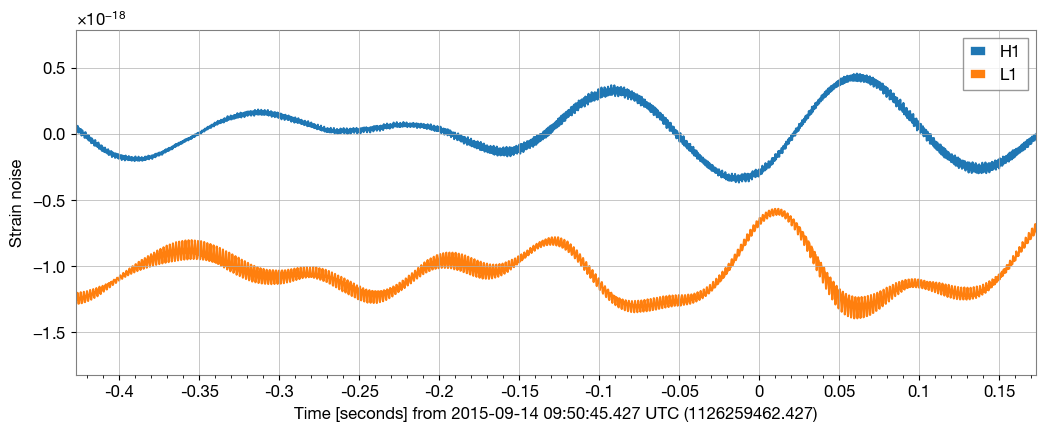
Woah. That looks terrible. Where is the nobel-prize winning poster-child signal?
We may need to clean up the data a bit to actually ‘see’ the signal. Lets get the data for the PSD and take a look at the noise once again
# downloading data
psd_start_time = start_time + duration
psd_duration = 128
psd_end_time = psd_start_time + psd_duration
psd_tukey_alpha = 2 * roll_off / duration
overlap = duration / 2
for ifo in interferometers:
print(
f"Getting {ifo.name} PSD data segment (can take ~ 1min)"
)
psd_data = download_strain(
ifo.name, psd_start_time, psd_end_time, outdir=OUTDIR
)
psd = psd_data.psd(
fftlength=duration, overlap=overlap, window=("tukey", psd_tukey_alpha),
method="median"
)
ifo.power_spectral_density = PowerSpectralDensity(
frequency_array=psd.frequencies.value, psd_array=psd.value
)
Getting H1 PSD data segment (can take ~ 1min)
Getting L1 PSD data segment (can take ~ 1min)
# plotting
for ifo in interferometers:
analysis_data = abs(ifo.frequency_domain_strain)
plt.loglog(ifo.frequency_array, analysis_data, label="Analysis Data")
plt.loglog(ifo.frequency_array, abs(ifo.amplitude_spectral_density_array),
label="ASD (estimated noise)")
plt.xlim(ifo.minimum_frequency, ifo.maximum_frequency)
ymin_max = [min(analysis_data), max(analysis_data)]
plt.vlines([60, 120], *ymin_max, ls="--", color='k', zorder=-10)
plt.fill_betweenx(ymin_max, 50, 250, color='tab:green', alpha=0.1)
plt.xlabel("Frequency [Hz]")
plt.ylabel(r'Strain [strain/$\sqrt{\rm Hz}$]')
plt.title(f"{ifo.name} data")
plt.ylim(*ymin_max)
plt.legend()
plt.show()
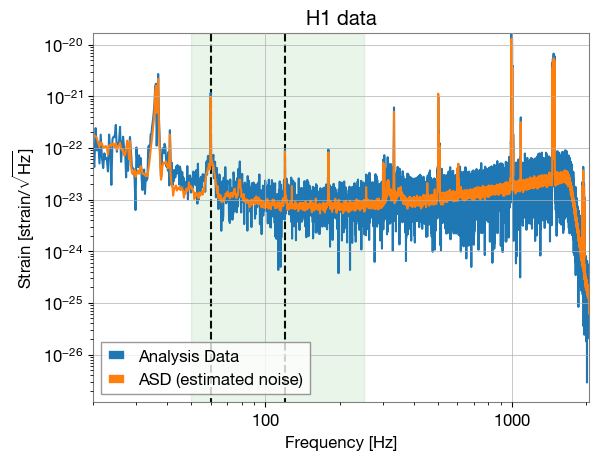
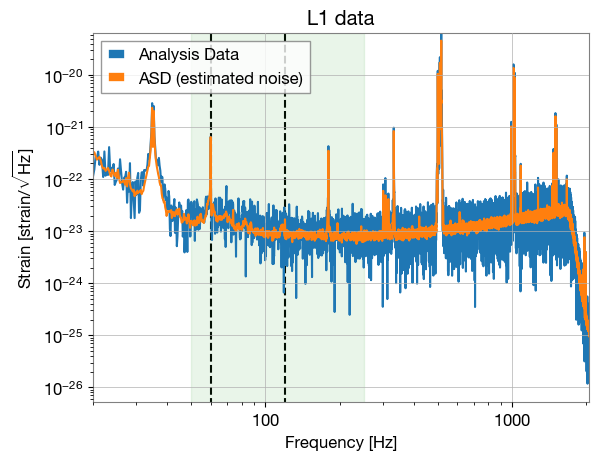
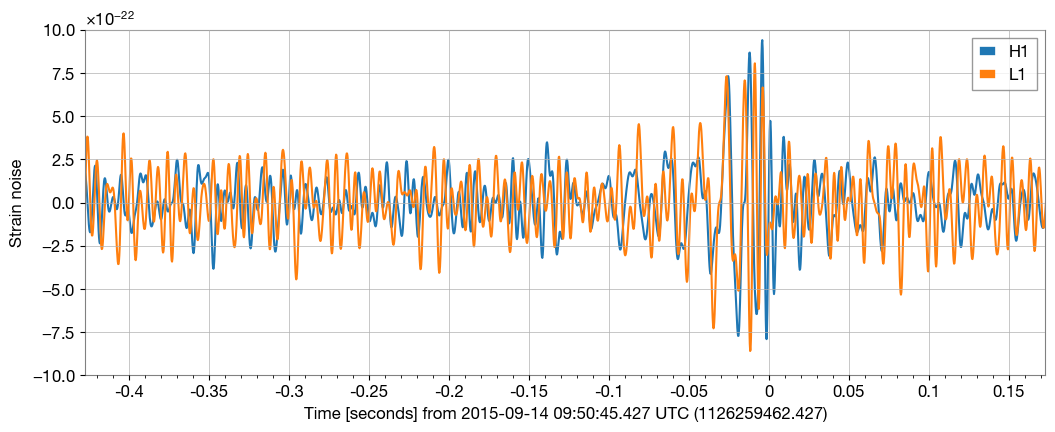
Lets notch out the 60 and 120 Hz violin modes (black vertical lines), and only keep data within the 50-250Hz range (marked in green) from the raw data and re-plot:
plot = GWpyPlot(figsize=(12, 4.8))
ax = plot.add_subplot(xscale='auto-gps')
for ifo_name, data in raw_data.items():
filtered_data = data.bandpass(50, 250).notch(60).notch(120)
ax.plot(filtered_data, label=ifo_name)
ax.set_epoch(1126259462.427)
ax.set_xlim(1126259462, 1126259462.6)
ax.set_ylim(-1e-21, 1e-21)
ax.set_ylabel('Strain noise')
ax.legend()
plot.show()
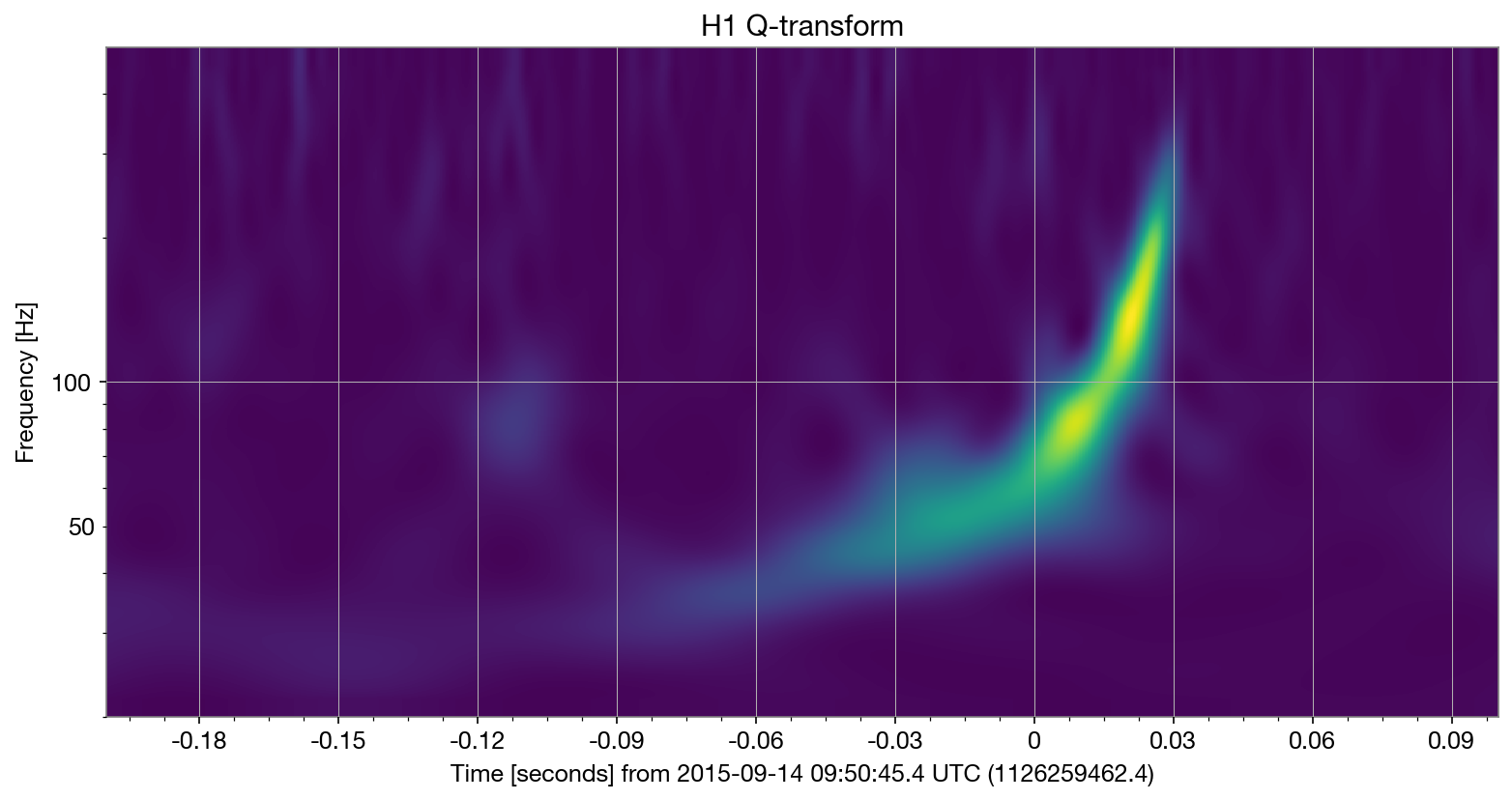
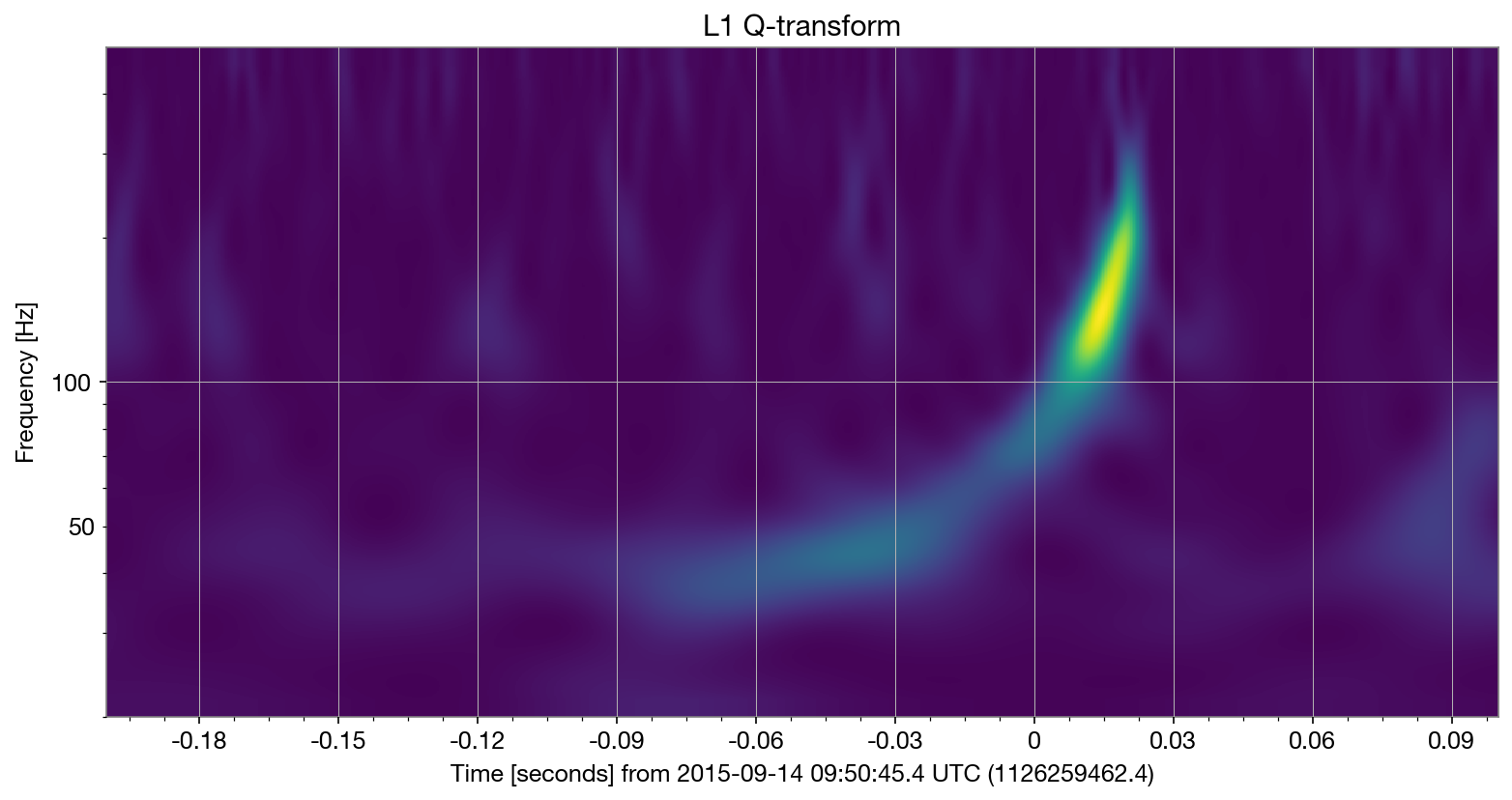
Noiceee… Lets plot the signals in the frequency domain:
tc = trigger_time
for ifo_name, data in raw_data.items():
qtrans = data.q_transform(
frange=(20,500), fres = 0.05,
outseg=(tc-0.2, tc+0.1)
)
plot = qtrans.plot(cmap = 'viridis', dpi = 150)
ax = plot.gca()
ax.set_title(f'{ifo_name} Q-transform')
ax.set_epoch(trigger_time)
ax.set_yscale('log')
Getting priors#
Now lets write down our priors for this event’s analysis. Note that again we set several delta functions and restrict the search space to speed up analysis for the sake of this tutorial.
# setup the prior
from bilby.core.prior import Uniform, PowerLaw, Sine, Constraint, Cosine
from corner import corner
import pandas as pd
# typically we would use a priors with wide bounds:
tc = trigger_time
priors = BBHPriorDict(dict(
mass_ratio=Uniform(name='mass_ratio', minimum=0.125, maximum=1),
chirp_mass=Uniform(name='chirp_mass', minimum=25, maximum=31),
mass_1=Constraint(name='mass_1', minimum=10, maximum=80),
mass_2=Constraint(name='mass_2', minimum=10, maximum=80),
a_1=Uniform(name='a_1', minimum=0, maximum=0.99),
a_2=Uniform(name='a_2', minimum=0, maximum=0.99),
tilt_1=Sine(name='tilt_1'),
tilt_2=Sine(name='tilt_2'),
phi_12=Uniform(name='phi_12', minimum=0, maximum=2 * np.pi, boundary='periodic'),
phi_jl=Uniform(name='phi_jl', minimum=0, maximum=2 * np.pi, boundary='periodic'),
luminosity_distance=PowerLaw(alpha=2, name='luminosity_distance', minimum=50, maximum=2000),
dec=Cosine(name='dec'),
ra=Uniform(name='ra', minimum=0, maximum=2 * np.pi, boundary='periodic'),
theta_jn=Sine(name='theta_jn'),
psi=Uniform(name='psi', minimum=0, maximum=np.pi, boundary='periodic'),
phase=Uniform(name='phase', minimum=0, maximum=2 * np.pi, boundary='periodic'),
geocent_time=Uniform(minimum=tc - 0.1, maximum=tc + 0.1, latex_label="$t_c$", unit="$s$")
))
# HACK: for this example (to make analysis faster) we will use a prior with tighter bounds
priors['luminosity_distance'] = 419.18
priors['mass_1'] = Constraint(name='mass_1', minimum=30, maximum=50)
priors['mass_2'] = Constraint(name='mass_2', minimum=20, maximum=40)
priors['ra'] = 2.269
priors['dec'] = -1.223
priors['geocent_time'] = tc
priors['theta_jn'] = 2.921
priors['phi_jl'] = 0.968
priors['psi'] = 2.659
# dont do this in a real run
prior_samples = priors.sample(10000)
prior_samples_df = pd.DataFrame(prior_samples)
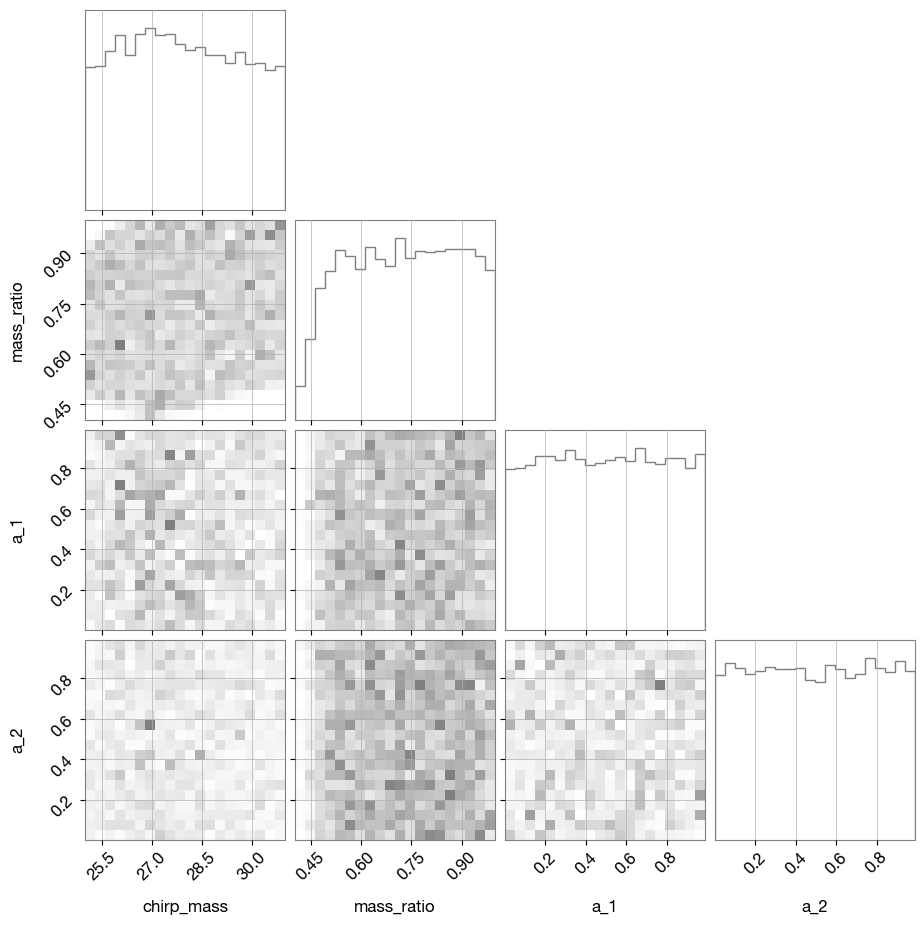
Plots of some priors:
parameters = ['chirp_mass', 'mass_ratio', 'a_1', 'a_2']
fig = corner(
prior_samples_df[parameters], plot_datapoints=False,
plot_contours=False, plot_density=True,
color="tab:gray",
labels=parameters,
)
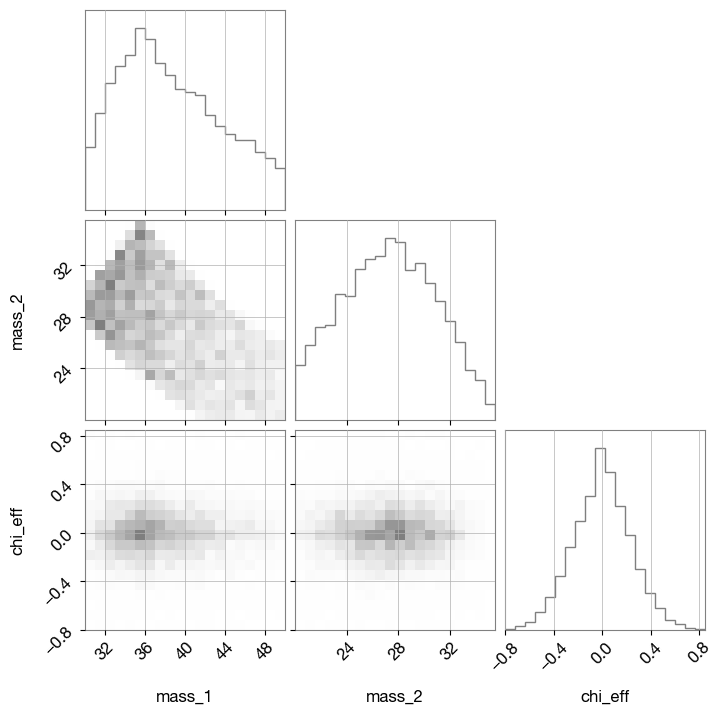
Lets convert some parameters and see what the prior-distributions we get
from bilby.gw.conversion import generate_mass_parameters
prior_samples = generate_mass_parameters(prior_samples)
prior_samples['cos_tilt_1'] = np.cos(prior_samples['tilt_1'])
prior_samples['cos_tilt_2'] = np.cos(prior_samples['tilt_2'])
s1z = prior_samples["a_1"] * prior_samples['cos_tilt_1']
s2z = prior_samples["a_2"] * prior_samples['cos_tilt_2']
q = prior_samples['mass_ratio']
prior_samples['chi_eff'] = (s1z + s2z * q) / (1 + q)
prior_samples_df = pd.DataFrame(prior_samples)
prior_samples_df
parameters = ['mass_1', 'mass_2', 'chi_eff']
fig = corner(
prior_samples_df[parameters],
plot_datapoints=False, plot_contours=False, plot_density=True,
color="tab:gray", labels=parameters,
)
Inference step#
waveform_generator = WaveformGenerator(
duration=interferometers.duration,
sampling_frequency=interferometers.sampling_frequency,
frequency_domain_source_model=lal_binary_black_hole,
parameter_conversion=convert_to_lal_binary_black_hole_parameters,
waveform_arguments=dict(
waveform_approximant="IMRPhenomPv2",
reference_frequency=20)
)
likelihood = GravitationalWaveTransient(
interferometers=interferometers, waveform_generator=waveform_generator,
priors=priors, time_marginalization=False, distance_marginalization=False,
phase_marginalization=True, jitter_time=False
)
if RE_RUN_SLOW_CELLS:
bilby_logger.setLevel(logging.INFO)
result = run_sampler(
likelihood=likelihood, priors=priors, save=True,
label="GW150914",
nlive=50, walks=25, # HACK: use defaults nlive/walks (much more aggressive)
conversion_function=generate_all_bbh_parameters,
result_class=CBCResult,
)
else:
print("Skipping sampling...")
fn = f"{OUTDIR}/GW150914_result.json"
download(GW150914_URL, fn)
result = bilby.gw.result.CBCResult.from_json(filename=fn)
print("Loaded result!")
Skipping sampling...
Loaded result!
fig = result.plot_corner(parameters=["mass_ratio", "chi_eff"], save=False)
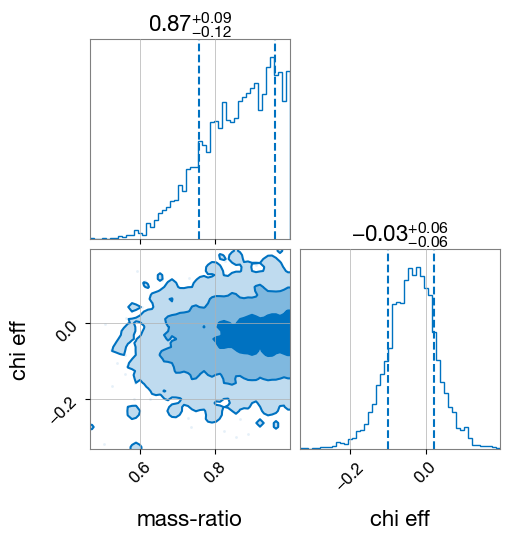
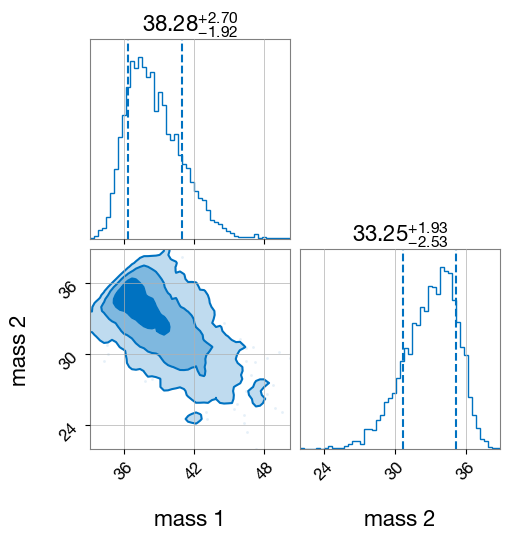
fig = result.plot_corner(parameters=["mass_1", "mass_2"], save=False)
NOTE: To get some proper results, we’d have to run with more robust sampler settings and wider priors.
Accessing GWTC parameter estimation results#
The GWTC data and parameter estimation results are all online (eg https://zenodo.org/record/5546663). Lets download one result and make some plots:
import logging
OUTDIR="outdir/"
GW200308_fn = f"{OUTDIR}/GW200308_result.h5"
download(GW200308_URL, GW200308_fn)
import h5py
GW200308_result = h5py.File(GW200308_fn, "r")
print("GW200308 samples loaded!")
GW200308 samples loaded!
Lets look at what is stored:
print(list(GW200308_result.keys()))
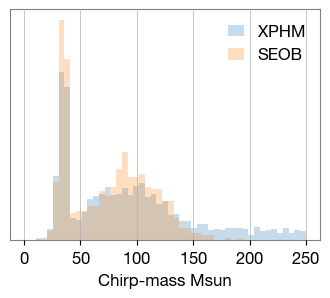
print(list(GW200308_result['C01:IMRPhenomXPHM'].keys()))
['C01:IMRPhenomXPHM', 'C01:Mixed', 'C01:SEOBNRv4PHM', 'history', 'version']
['approximant', 'calibration_envelope', 'config_file', 'description', 'injection_data', 'meta_data', 'posterior_samples', 'priors', 'psds', 'skymap', 'version']
print("Parameters stored:")
for i in GW200308_result['C01:IMRPhenomXPHM']['posterior_samples'].dtype.names:
print(f" {i}")
Parameters stored:
luminosity_distance
geocent_time
recalib_H1_frequency_0
recalib_H1_frequency_1
recalib_H1_frequency_2
recalib_H1_frequency_3
recalib_H1_frequency_4
recalib_H1_frequency_5
recalib_H1_frequency_6
recalib_H1_frequency_7
recalib_H1_frequency_8
recalib_H1_frequency_9
recalib_L1_frequency_0
recalib_L1_frequency_1
recalib_L1_frequency_2
recalib_L1_frequency_3
recalib_L1_frequency_4
recalib_L1_frequency_5
recalib_L1_frequency_6
recalib_L1_frequency_7
recalib_L1_frequency_8
recalib_L1_frequency_9
recalib_V1_frequency_0
recalib_V1_frequency_1
recalib_V1_frequency_2
recalib_V1_frequency_3
recalib_V1_frequency_4
recalib_V1_frequency_5
recalib_V1_frequency_6
recalib_V1_frequency_7
recalib_V1_frequency_8
recalib_V1_frequency_9
chirp_mass
mass_ratio
a_1
a_2
tilt_1
tilt_2
phi_12
phi_jl
theta_jn
psi
phase
azimuth
zenith
recalib_H1_amplitude_0
recalib_H1_amplitude_1
recalib_H1_amplitude_2
recalib_H1_amplitude_3
recalib_H1_amplitude_4
recalib_H1_amplitude_5
recalib_H1_amplitude_6
recalib_H1_amplitude_7
recalib_H1_amplitude_8
recalib_H1_amplitude_9
recalib_H1_phase_0
recalib_H1_phase_1
recalib_H1_phase_2
recalib_H1_phase_3
recalib_H1_phase_4
recalib_H1_phase_5
recalib_H1_phase_6
recalib_H1_phase_7
recalib_H1_phase_8
recalib_H1_phase_9
recalib_L1_amplitude_0
recalib_L1_amplitude_1
recalib_L1_amplitude_2
recalib_L1_amplitude_3
recalib_L1_amplitude_4
recalib_L1_amplitude_5
recalib_L1_amplitude_6
recalib_L1_amplitude_7
recalib_L1_amplitude_8
recalib_L1_amplitude_9
recalib_L1_phase_0
recalib_L1_phase_1
recalib_L1_phase_2
recalib_L1_phase_3
recalib_L1_phase_4
recalib_L1_phase_5
recalib_L1_phase_6
recalib_L1_phase_7
recalib_L1_phase_8
recalib_L1_phase_9
recalib_V1_amplitude_0
recalib_V1_amplitude_1
recalib_V1_amplitude_2
recalib_V1_amplitude_3
recalib_V1_amplitude_4
recalib_V1_amplitude_5
recalib_V1_amplitude_6
recalib_V1_amplitude_7
recalib_V1_amplitude_8
recalib_V1_amplitude_9
recalib_V1_phase_0
recalib_V1_phase_1
recalib_V1_phase_2
recalib_V1_phase_3
recalib_V1_phase_4
recalib_V1_phase_5
recalib_V1_phase_6
recalib_V1_phase_7
recalib_V1_phase_8
recalib_V1_phase_9
time_jitter
log_likelihood
ra
dec
H1_matched_filter_snr
H1_optimal_snr
L1_matched_filter_snr
L1_optimal_snr
V1_matched_filter_snr
V1_optimal_snr
maximum_frequency
pn_spin_order
pn_tidal_order
pn_phase_order
pn_amplitude_order
total_mass
mass_1
mass_2
symmetric_mass_ratio
phi_1
phi_2
chi_eff
chi_1_in_plane
chi_2_in_plane
chi_p
cos_tilt_1
cos_tilt_2
comoving_distance
H1_matched_filter_abs_snr
H1_matched_filter_snr_angle
L1_matched_filter_abs_snr
L1_matched_filter_snr_angle
V1_matched_filter_abs_snr
V1_matched_filter_snr_angle
redshift
inverted_mass_ratio
mass_1_source
mass_2_source
total_mass_source
chirp_mass_source
iota
spin_1x
spin_1y
spin_1z
spin_2x
spin_2y
spin_2z
tilt_1_infinity_only_prec_avg
tilt_2_infinity_only_prec_avg
chi_p_2spin
spin_1z_infinity_only_prec_avg
spin_2z_infinity_only_prec_avg
chi_eff_infinity_only_prec_avg
chi_p_infinity_only_prec_avg
beta
psi_J
final_spin
peak_luminosity
final_mass
cos_tilt_1_infinity_only_prec_avg
cos_tilt_2_infinity_only_prec_avg
final_mass_source
radiated_energy
H1_time
L1_time
V1_time
network_optimal_snr
network_matched_filter_snr
cos_theta_jn
viewing_angle
cos_iota
xphm_mc = GW200308_result['C01:IMRPhenomXPHM']['posterior_samples']['chirp_mass'][:]
seob_mc = GW200308_result['C01:SEOBNRv4PHM']['posterior_samples']['chirp_mass'][:]
fig, ax = plt.subplots(figsize=(4,3))
bins = np.linspace(0, 250, 50)
ax.hist(xphm_mc, bins=bins, density=True, histtype='stepfilled', label='XPHM', lw=2,alpha=0.25)
ax.hist(seob_mc, bins=bins, density=True, histtype='stepfilled', label='SEOB', lw=2,alpha=0.25)
ax.set_yticks([])
ax.legend(frameon=False)
ax.set_xlabel("Chirp-mass Msun");
Text(0.5, 0, 'Chirp-mass Msun')